Netzer DS-25 17 Did Resolution Absolute Encoder

Rhagymadrodd
- Fersiwn 2.0: Tachwedd 2021
Dogfennau perthnasol
- Taflen ddata amgodiwr trydan DS-25
Amddiffyniad ESD
Yn ôl yr arfer ar gyfer cylchedau electronig, wrth drin cynnyrch peidiwch â chyffwrdd â chylchedau electronig, gwifrau, cysylltwyr na synwyryddion heb amddiffyniad ESD addas. Rhaid i'r integreiddiwr / gweithredwr ddefnyddio offer ESD i osgoi'r risg o ddifrod cylched.
SYLW
ARSYLWI RHAGOLYGON AR GYFER YMDRIN Â DYFEISIAU ELECTROSTATIG-SENSITIF
Cynnyrch Drosview
Drosoddview
Mae'r DS-25 sefyllfa absoliwt Electric Encoder™ yn synhwyrydd sefyllfa chwyldroadol a ddatblygwyd yn wreiddiol ar gyfer cymwysiadau amgylchedd amgylchedd llym. Ar hyn o bryd, mae'n perfformio mewn ystod eang o gymwysiadau, gan gynnwys amddiffyn, diogelwch mamwlad, awyrofod, ac awtomeiddio meddygol a diwydiannol. Mae technoleg digyswllt y Electric Encoder™ yn dibynnu ar ryngweithiad rhwng y dadleoliad mesuredig a maes trydanol gofod/amser wedi'i fodiwleiddio. Mae'r DS-25 Electric Encoder™ yn lled-fodiwlaidd, hy, mae ei rotor a'i stator ar wahân, gyda'r stator yn cadw'r rotor yn ddiogel.
- Stator encoder
- Rotor encoder
- Mowntio amgodiwr clamps
- Clymwr rotor
- Rhyngwyneb cebl

Siart llif gosod
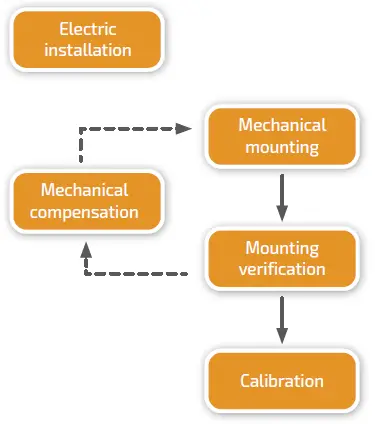
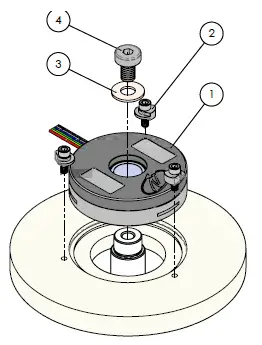
Mowntio amgodiwr
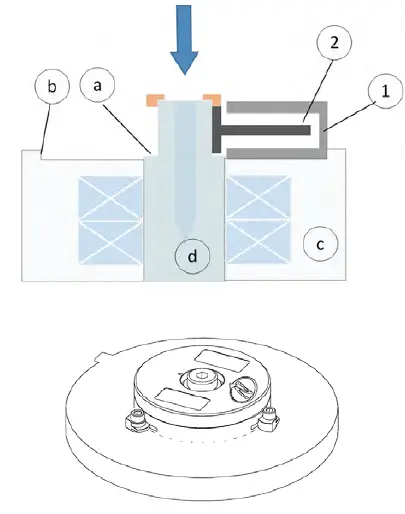
Mae'r rotor amgodiwr (2) yn glynu wrth y siafft gwesteiwr (d) trwy ei wasgu yn erbyn ysgwydd bwrpasol (a), sgriw a golchwr neu sbring crwn a golchwr ar ddiwedd yr ysgwydd i gynnal pwysau, grym a argymhellir o 0.3 Nm gyda sgriw M3.
Mae'r stator amgodiwr (1) wedi'i ganoli gan gam cylchedd (b) ac ynghlwm wrth y stator gwesteiwr (c) gan ddefnyddio tri amgodiwr clamps, grym a argymhellir o 0.3 Nm gyda'r amgodiwr a gyflenwir clamps.
Nodyn:
PEIDIWCH â defnyddio deunyddiau cloi sgriw sy'n cynnwys Cyanoacrylate sy'n rhyngweithio'n ymosodol â'r corff synhwyrydd a wneir o Ultem.
Safle cymharol amgodiwr/Rotor
Mae'r rotor yn arnofio, felly, ar gyfer pellter gosod planau echelinol priodol "H" rhwng ysgwydd y siafft (b) a gilfach gosod stator (a) dylai fod yn 1.4 mm enwol.
Er mwyn hwyluso iawndal mowntio mecanyddol gan rotor shims, y pellter a argymhellir yw 1.4 - 0.05 mm, gan gynhyrchu allbwn analog. Y gorau a argymhellir ampmae gwerthoedd litude yn ganol yr ystod yn ôl y rhai a ddangosir yn y meddalwedd Encoder Explorer ac yn amrywio yn ôl y math o amgodiwr.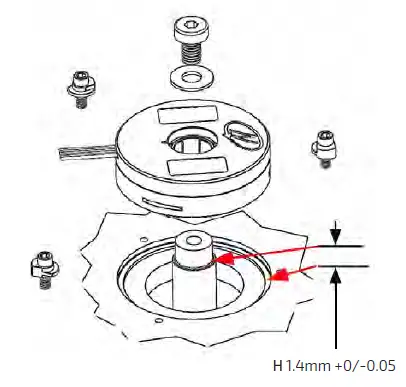
Mae'r DS-25 ampiawndal litudes
Bydd iawndal mecanyddol trwy ddefnyddio 50 um shims o dan y rotor (ar gael fel pecyn DS-25-R-00), yn cynyddu'r amplefel litude gan ~ 50mV. Dilyswch osodiad rotor cywir gyda'r offer Encoder Explorer “Dadansoddwr Signal” neu “Gwirio gosod mecanyddol.”
Nodyn: am ragor o wybodaeth darllenwch baragraff 6
Dadbacio
Trefn safonol
Mae pecyn y DS-25 safonol yn cynnwys yr amgodiwr gyda chebl shildedd 250mm AWG30 ac EAPK004 mowntio amgodiwr cit clamps, (3 clamps, 0-80 UNF HEX sgriw soced L 3/16”, SS )
Ategolion dewisol:
- DS-25-R-00, pecyn shims Rotor (x10 shims dur gwrthstaen, 50um yr un)
- MA-DS25-004, pecyn gosod diwedd siafft (sgriw M3x5 + golchwr)
- CNV-00003, RS-422 i drawsnewidydd USB (Modd Gosod)
- NanoMIC-KIT-01, RS-422 i drawsnewidydd USB. Dulliau gosod a gweithredu trwy ryngwyneb SSi / BiSS.
- DKIT-DS-25-SF-S0, Amgodiwr SSi wedi'i osod ar jig cylchdro, RS-422 i drawsnewidydd USB a cheblau.
- DKIT-DS-25-IF-S0, amgodiwr BiSS wedi'i osod ar jig cylchdro, RS-422 i drawsnewidydd USB a cheblau.
Cydgysylltiad trydanol
Mae'r bennod hon ynghylchviews y camau sydd eu hangen i gysylltu'r amgodiwr yn drydanol â rhyngwyneb digidol (SSi neu BiSS-C).
Cysylltu'r amgodiwr
Mae gan yr amgodiwr ddau ddull gweithredol:
Safle absoliwt dros SSi neu BiSS-C:
Dyma'r modd rhagosodedig pŵer i fyny
Cod lliw gwifrau rhyngwyneb SSi / BiSS
| Cloc + | Llwyd |
Cloc |
| Cloc - | Glas | |
| Data - | Melyn |
Data |
| Data + | Gwyrdd | |
| GND | Du | Daear |
| +5V | Coch | Cyflenwad pŵer |
Modd gosod dros NCP (Protocol Cyfathrebu Netzer)
Mae'r modd gwasanaeth hwn yn darparu mynediad trwy USB i gyfrifiadur personol sy'n rhedeg cymhwysiad Netzer Encoder Explorer (ar MS Windows 7/10). Mae cyfathrebu trwy Brotocol Cyfathrebu Netzer (NCP) dros RS-422 gan ddefnyddio'r un set o wifrau. Defnyddiwch yr aseiniad pin canlynol i gysylltu'r amgodiwr â chysylltydd math D 9-pin â'r trawsnewidydd RS-422/USB CNV-0003 neu'r NanoMIC.
Rhyngwyneb amgodiwr trydan, D Math 9 pin Benyw
| Disgrifiad | Lliw | Swyddogaeth | Pin Rhif |
|
Cloc SSi / NCP RX |
Llwyd | Cloc / RX + | 2 |
| Glas | Cloc / RX – | 1 | |
|
Data SSi / NCP TX |
Melyn | Data / TX - | 4 |
| Gwyrdd | Data / TX + | 3 | |
| Daear | Du | GND | 5 |
| Cyflenwad pŵer | Coch | +5V | 8 |
Cysylltiad trydanol a sylfaen
NID yw'r amgodiwr yn dod â chebl a chysylltydd penodedig, fodd bynnag, cadwch yr ystyriaethau sylfaenol:
- Nid yw'r darian cebl yn cysylltu â llinell ddychwelyd y cyflenwad pŵer.
- Tiriwch y siafft gwesteiwr i osgoi ymyrraeth gan y system letyol, a allai arwain at sŵn mewnol amgodiwr.
Nodyn: Mae angen cyflenwad pŵer 4.75 i 5.25 VDC
Gosod meddalwedd
Meddalwedd y Electric Encoder Explorer (EEE):
- Yn Gwirio Cywirdeb Mowntio Mecanyddol
- Graddnodi Gwrthbwyso
- Yn sefydlu dadansoddiad cyffredinol a signal
Mae'r bennod hon ynghylchviews y camau sy'n gysylltiedig â gosod y cais meddalwedd EEE.
Gofynion lleiaf
- System weithredu: MS windows 7/ 10, (32 / 64 bit)
- Cof: Isafswm o 4MB
- Porthladdoedd cyfathrebu: USB 2
- Fframwaith Windows .NET, V4 lleiaf
Gosod y meddalwedd
- Rhedeg y Electric Encoder™ Explorer file dod o hyd ar y Netzer websafle: Encoder Explorer Software Tools
- Ar ôl y gosodiad, fe welwch eicon meddalwedd Electric Encoder Explorer ar fwrdd gwaith y cyfrifiadur.
- Cliciwch ar yr eicon meddalwedd Electric Encoder Explorer i ddechrau.
Wrthi'n mowntio dilysu
Dechrau'r Encoder Explorer
Gwnewch yn siŵr eich bod chi'n cwblhau'r tasgau canlynol yn llwyddiannus:
- Mowntio Mecanyddol
- Cysylltiad Trydanol
- Cysylltu Amgodiwr ar gyfer Graddnodi
- Gosod Meddalwedd Encoder Explore
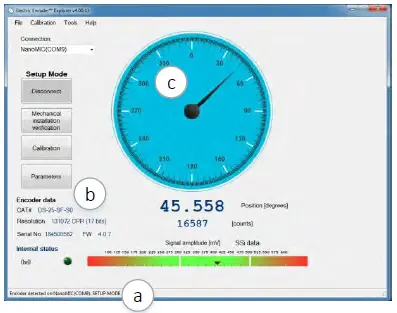
Rhedeg yr Offeryn Archwiliwr Trydan Encoder (EEE)
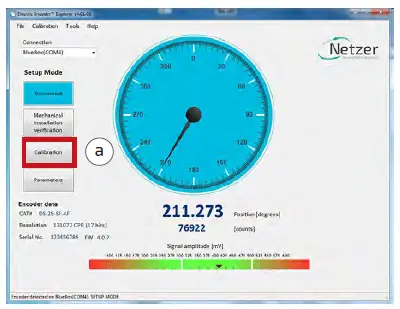
Sicrhewch gyfathrebu cywir â'r amgodiwr: (Modd gosod yn ddiofyn).
- Mae'r bar statws yn dynodi cyfathrebu llwyddiannus.
- Arddangosfeydd data amgodiwr yn yr ardal ddata amgodiwr. (Rhif CAT, Rhif Cyfresol)
- Mae'r arddangosfa deialu sefyllfa yn ymateb i gylchdroi siafft.
Perfformio dilysu mowntio a dewis cyfeiriad cylchdroi cyn graddnodi i sicrhau'r perfformiad gorau posibl. Argymhellir hefyd arsylwi ar y gosodiad yn y ffenestr [Tools - Signal Analizer].Gwiriad gosod mecanyddol
Mae'r Dilysiad Gosod Mecanyddol yn darparu gweithdrefn a fydd yn sicrhau mowntio mecanyddol cywir trwy gasglu data crai o'r sianeli mân a bras yn ystod cylchdroi. - Dewiswch [Mechanical Mounting Verification] ar y brif sgrin.

- Dewiswch [Cychwyn] i gychwyn y casgliad data.
- Cylchdroi'r siafft er mwyn casglu data'r sianeli mân a bras.
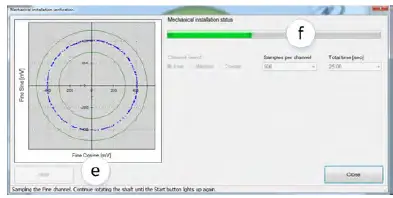
- Ar ddiwedd dilysiad llwyddiannus, bydd y SW yn dangos “Gosodiad Mecanyddol Cywir.”
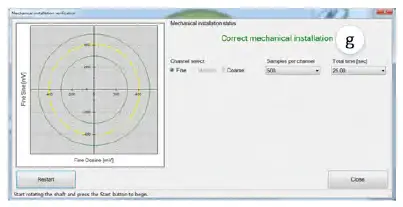
- Os yw'r SW yn nodi "Gosodiad Mecanyddol Anghywir," cywirwch leoliad mecanyddol y rotor, fel y'i cyflwynir ym mharagraff 3.3 - "Sefyllfa Berthynol y Rotor."

Calibradu
Nodwedd newydd
Opsiwn Auto-Calibrad wedi'i alluogi. Cyfeiriwch at y ddogfen: Auto-calibradu-feature-user-manual-V01
Graddnodi gwrthbwyso
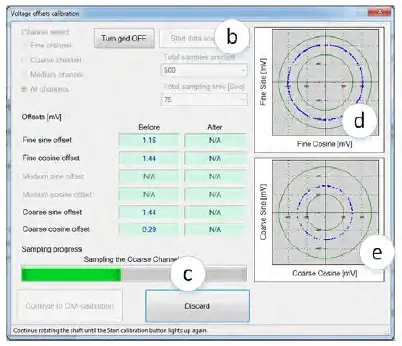
I gael y perfformiad gorau posibl gan yr Amgodyddion Trydan, rhaid gwneud iawn am wrthbwyso DC anochel y signalau sin a chosin dros y sector gweithredol.
Ar ôl cwblhau'r weithdrefn Mowntio Dilysu yn llwyddiannus:
- Dewiswch [Calibradiad] ar y brif sgrin.
- Dechreuwch y caffael data wrth gylchdroi'r siafft. Mae bar cynnydd (c) yn dangos cynnydd y casgliad. Cylchdroi'r echel yn gyson wrth gasglu data - sy'n cwmpasu sector gweithio'r cais o'r diwedd i'r diwedd yn ddiofyn mae'r weithdrefn yn casglu 500 o bwyntiau dros 75 eiliad. Nid yw cyflymder cylchdroi yn baramedr wrth gasglu data. Mae arwydd casglu data yn dangos ar gyfer y sianeli mân/bras, mae cylch “tenau” clir yn ymddangos yn y canol (d) (e) gyda rhywfaint o wrthbwyso.
Wrthbwyso iawndal dirwy / sianel Corse 
CAA graddnodi
Mae'r graddnodi canlynol yn alinio'r sianel fras/mân trwy gasglu data o bob pwynt o'r ddwy sianel. Dewiswch [Parhau i raddnodi CAA] Yn ffenestr graddnodi ongl CAA, dewiswch y botwm opsiwn perthnasol o'r opsiynau ystod mesur (a):
- Cylchdroi mecanyddol llawn - mae symudiad siafft dros 10deg - argymhellir.
- Rhan gyfyngedig - diffiniwch weithrediad y siafft mewn ongl gyfyngedig a ddiffinnir gan raddau rhag ofn y bydd <10deg
- Rhydd sampmoddau ling - diffiniwch nifer y pwyntiau graddnodi yng nghyfanswm nifer y pwyntiau yn y blwch testun. Mae'r system yn dangos y nifer o bwyntiau a argymhellir yn ddiofyn. Casglwch leiafswm o naw pwynt dros y sector gwaith.
- Cliciwch y botwm [Start Calibro] (b)
- Mae statws (c) yn nodi'r gweithrediad gofynnol nesaf; statws symudiad siafft; y sefyllfa bresennol, a'r sefyllfa darged nesaf y dylid cylchdroi'r amgodiwr iddo.
- Cylchdroi'r siafft/encoder i'r safle nesaf a chliciwch ar y botwm [Parhau] (c)
- dylai'r siafft fod yn STAND STILL yn ystod y casglu data. Dilynwch yr arwydd/rhyngweithiadau yn ystod y broses gylchol ar gyfer lleoli'r siafft –> sefyll yn llonydd –> darllen cyfrifiad.
- Ailadroddwch y cam uchod ar gyfer pob pwynt diffiniedig. Gorffen (d)
- Cliciwch y botwm [Cadw a Parhau] (e).
Mae'r cam olaf yn arbed y paramedrau CAA gwrthbwyso, gan gwblhau'r broses graddnodi.
Gosod pwynt sero'r amgodiwr
Gellir diffinio'r sefyllfa sero unrhyw le yn y sector gwaith. Cylchdroi'r siafft i'r safle sero mecanyddol dymunol. Ewch i mewn i'r botwm “Calibration” ar y bar dewislen uchaf, a gwasgwch “Set UZP”. Dewiswch “Gosod y Sefyllfa Gyfredol” fel sero trwy ddefnyddio'r opsiwn perthnasol, a chliciwch [Gorffen].
Prawf jitter
Perfformio prawf jitter i werthuso ansawdd y gosodiad; mae'r prawf jitter yn cyflwyno ystadegau darllen darlleniadau safle absoliwt (cyfrif) dros amser. Dylai jitter cyffredin fod i fyny +/- 3 chyfrif; gall jitter uwch ddangos sŵn system.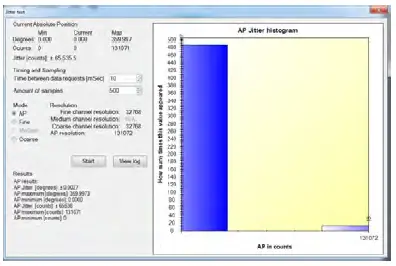
Rhag ofn nad yw'r data darllen (smotiau glas) wedi'u dosbarthu'n gyfartal ar gylch tenau, efallai y byddwch chi'n profi "sŵn" yn eich gosodiad (gwirio siafft / sylfaen stator).
Modd Gweithredol
SSi/BiSS
Arwydd modd gweithredol o'r rhyngwyneb SSi / BiSS Encoder sydd ar gael trwy ddefnyddio'r NanoMIC. I gael rhagor o wybodaeth darllenwch am NanoMIC ar Netzer websafle Mae'r modd gweithredol yn cyflwyno'r rhyngwyneb SSi / BiSS “go iawn” gyda chyfradd cloc 1MHz.
Protocol SSi
Protocol BiSS

Darluniau Mecanyddol

Oni nodir yn wahanol
| Mae'r dimensiynau mewn: mm | Gorffeniad wyneb: N6 |
Goddefiannau llinol
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
DS-25 gyda llawes metel rotor


Oni nodir yn wahanol
| Mae'r dimensiynau mewn: mm | Gorffeniad wyneb: N6 |
Goddefiannau llinol
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
Siafft - Gorffen gosod (cam)

Oni nodir yn wahanol
| Mae'r dimensiynau mewn: mm | Gorffeniad wyneb: N6 |
Goddefiannau llinol
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
Dim Rhan/Disgrifiad/QTY
| 1 | DS-25 | Yn gynwysedig | DS-25 amgodiwr | 1 | |
| 2 | EAPK004 | Yn gynwysedig | Pecyn 0-80” | 3 x amgodiwr clamps neilon | 1 |
| 3 |
MA-DS25-004 |
Dewisol |
Pecyn gosod pen siafft |
Golchwr DIN125-A3.2 | 1 |
| 4 | Sgriwio DIN 7984 M3x5 | 1 |
Dimensiynau critigol wedi'u marcio â
RHYBUDD
Peidiwch â defnyddio Loctite na gludion eraill sy'n cynnwys Cyanoacrylate. Rydym yn argymell defnyddio glud 3M - Gludydd Epocsi Scotch-WeldTM EC-2216 B/A.
Dwfn, Siafft - Gorffen gosod (cam)

Oni nodir yn wahanol
- Mae dimensiynau yn: mm Gorffeniad wyneb: N6
Goddefiannau llinol
- 0.5-4.9: ±0.05 mm 5-30: ±0.1 mm
- 31-120: ±0.15 mm 121-400: ±0.2 mm
Dim Rhan/Disgrifiad/QTY
| 1 | DS-25 | Yn gynwysedig | DS-25 amgodiwr | 1 | |
| 2 | EAPK005 | Dewisol | Cit | Amgodiwr 3 x M2 clamps | 1 |
| 3 |
MA-DS25-004 |
Dewisol |
Pecyn gosod pen siafft |
Golchwr DIN125-A3.2 | 1 |
| 4 | Sgriwio DIN 7984 M3x5 | 1 |
Dimensiynau critigol wedi'u marcio â "*"
RHYBUDD
Peidiwch â defnyddio Loctite na gludion eraill sy'n cynnwys Cyanoacrylate. Rydym yn argymell defnyddio glud 3M - Gludydd Epocsi Scotch-WeldTM EC-2216 B/A.
Hawlfraint © 2021 Netzer Precision Position Sensors ACS Ltd. Cedwir pob hawl.
Dogfennau / Adnoddau
 |
Netzer DS-25 17 Did Resolution Absolute Encoder [pdfLlawlyfr Defnyddiwr DS-25 17 Bit Resolution Absolute Encoder, DS-25, 17 Did Resolution Absolute Encoder, Resolution Absolute Encoder, Absolute Encoder, Encoder |



